
In the late 1980s Craig Reynolds proposed a model of animal motion to model flocks, herds and schools, which he named boids. Reynolds' paper Steering Behaviors for Autonomous Characters covers boids as an aggregate of other steering behaviours. The paper has been very influential in robotics, game design, special effects and simulation, and remains well worth exploring as a collection of patterns for autonomous agent movements, so we will work through it in more detail.
The paper breaks agent movement in general into three layers:
His paper concentrates on several different steering algorithms. Action selection is not dealt with, as it is considered independent. Locomotion is extremely simple -- equivalent to a single force vector on a point mass -- but a more complex (and thus constrained) locomotion system could be swapped in without changing the steering model significantly. Many ideas for combining different steering force behaviours are given.
Notice that in the "related work" section the paper refences Grey Walter's Tortoises, Rodney Brooks' robotics, and Valentino Braitenberg's Vehicles.
The simple vehicle model, and all of the behaviours, make use of vectors -- representing positions in space, relative distances, velocities, forces and accelerations etc. We might need to add, subtract, scale, rotate, randomize etc. vectors. We could write a set of routines to do these things, or we could make use of an existing library such as gl-matrix.
In the Codepen JS tab, click the settings wheel to open up the JS settings. Search for "gl-matrix" in the "External scripts" "Search CDNjs" section, and select the "gl-Matrix" option. It will add the gl-matrix library to your script, e.g. "https://cdnjs.cloudflare.com/ajax/libs/gl-matrix/3.4.2/gl-matrix-min.js"
A quick "cheat-sheet" of vec2 (writing your own cheat sheets is a great way to keep notes on a library, API, SDK etc.)
let { vec2 } = glMatrix;
// vectors are stored in array form as [x, y]
let v = vec2.create() // [0, 0]
let v2 = vec2.clone(v)
// most operations have an "out" argument first
v3 = [0, 0];
vec2.add(v3, v1, v2); // v3 = v1 + v2
// or simply:
v3 = vec2.add([0, 0], v1, v2);
vec2.sub(out, a, b); // out = a - b
vec2.mul(out, a, b);
vec2.div(out, a, b);
vec2.scale(out, a, n); // out[0] = n * a[0]; out[1] = n * a[1]
vec2.negate(out, a); // out[0] = -a[0]; out[1] = -a[1]
vec2.set(out, x, y); // out[0] = x; out[1] = y
vec2.copy(out, a); // out[0] = a[0]; out[1] = a[1]
// length of vector:
let d = vec2.length(a);
// distance between two points
let d = vec2.distance(a, b);
// set "out" to rotation of "a" by "angle" around "origin":
vec2.rotate(out, a, origin, angle);
// make vector length equal 1, no change of direction
vec2.normalize(out, a);
// linear interpolation, a mix or blend along line between a (when t=0) and b (when t=1)
vec2.lerp(out, a, b, t);
// place "out" at a random point on a circle of radius "r"
vec2.random(out, r)More cheat-sheets for gl-matrix
position, velocity, acceleration, force can all be represented as vec2
Start with something simple -- a single agent, moving in space by a velocity, then by acceleration, then with a simple force (e.g. downward)
We may need to write our own function to limit a vector's length (for velocity limit, force limit etc.). E.g. get the length of the vector, limit it using Math.min(), and scale the vector by however much you reduced the length:
// limit the length of vector `v` to be no greater than `limit`
function vec2_maxlength(out, v, limit) {
const len = vec2.length(v);
const limited_len = Math.min(len, limit);
vec2.scale(out, v, limited_len / len);
return out;
}Perhaps it is a good idea to script a simple sketch with locomoting agents before going further.
Perhaps we should start from pseudocode?
Now all we need to do is work out the force, which can be a sum of multiple forces, external and internal
It may be better to separate force calculation and locomotion into different loops over the population. Why would that be?
What to do for force calculations around the edges? If you want to have a 'toroidal' space, where exiting one edge means re-entering at the opposite edge, you may need to compute relative position vectors wrapped in a range of -canvas.width/2 to +canvas.width/2. For example:
// wrap vector `v` in the region of [-w/2, -h/2] to [w/2, h/2]
function vec2_relativewrap(out, v, w, h) {
out[0] = ((((v[0] + w / 2) % w) + w) % w) - w / 2;
out[1] = ((((v[1] + h / 2) % h) + h) % h) - h / 2;
return out;
}We're starting to get more parameters, and it would be nice to be able to tweak them to see how it changes behviours. For a quick solution, search for the "dat-gui" library in the JS extensions. Here's the API docs. Cheatsheet:
// an container of parameters to control:
let params = {
speed: 1
}
// create the interface:
let gui = new dat.GUI({name: 'My GUI'});
// add a slider for params.speed, in the range of 0 to 10, stepping in 1's
gui.add(params, 'speed', 0, 10, 1);(If it doesn't show up, it might be because of the CSS setting: if you have * { overflow: hidden; } change it to body { overflow: hidden; })
Reynolds' most significant contribution combined several steering forces to a proposed model of animal motion emulating flocks, herds and schools.
So first, we need to scale up from one agent to a population -- using an array (list) of agents, and looping over them to update state, move, draw, etc. (Q: why do we do these as separate loops?)
Each agent, or "boid", follows a set of rules based on simple principles:
Computing the forces means we need to compare each boid to every other. The simplest way is a nested loop. Just be careful not to compare to ourself!
This is called an "N-squared" algorithm, because for N agents it implies making NxN comparisons. For small numbers of agents this is fine, but if you start having very large populations you might look into more complex "spatial accelerator" methods that can reduce the NxN complexity.
To make this more realistic, we can consider that each boid can only perceive other boids within a certain distance, and possibly also limited viewing angle. Take care for the case where no neighbors are found.
In addition we might want to add a random walk force, especially so that boids that can't see anyone else have some life to them.
Reynolds says:
Let's pseudocode before we do anything!
Note: The average of a set of vectors is just the sum of the vectors divided by the number of vectors.
Some things will be easier to compute if they are converted to the local perspective of an agent.
Remember, if you use a toroidal (donut) space, we should wrap any relative vectors too, so that the relative vector always is the shortest path around.
Once working, let's play around with different weights for the forces and limits (e.g. via a dat.gui interface) to understand the ranges of behaviour.
We could also visualize trails of where boids have gone, much as was done for Casey Reas' famous works.
There's a couple of different ways we could do this. One is to store paths each agent has gone into memory, and redraw these paths on every frame, just like we stored and redrawed the paths in Yellowtail.
Another way is to create a secondary canvas to draw into, one that exists "in memory" rather than in our HTML page, and which is more persistent (much like our first drawing sketches), which we can then draw into our background on each animation frame. We can create an additional canvas like this:
const trailCanvas = document.createElement("canvas");
const trailCtx = turtleCanvas.getContext("2d");Make it match the main canvas size with
trailCanvas.width = canvas.width;
trailCanvas.height = canvas.height;Draw into this canvas using trailCtx instead of our usual main canvas context, using the same kinds of routines (e.g. trailCtx.beginPath() etc.)
In the draw loop, after clearing our main canvas, we can draw in our offscreen trail canvas with ctx.drawImage(trailCanvas, 0, 0);
So far there is only a kind of primal, almost physical intelligence. How can we introduce a higher level of intelligence -- perhaps the "action selection" suggested by Reynolds, or something else?
What about the Braitenberg Vehicles -- can any of those ideas be incorporated here?
What are these Braitenberg vehicles that keep getting mentioned?
Braitenberg, V. (1984). Vehicles: Experiments in synthetic psychology. Cambridge, MA: MIT Press.
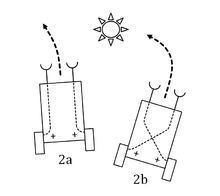
A Braitenberg vehicle is an agent that can autonomously move around. It has primitive sensors (measuring some stimulus at a point) and wheels (each driven by its own motor) that function as actuators or effectors. A sensor, in the simplest configuration, is directly connected to an effector, so that a sensed signal immediately produces a movement of the wheel. Depending on how sensors and wheels are connected, the vehicle exhibits different behaviors (which can be goal-oriented). wikipedia
Examples of the first couple of vehicles in a browser-based environment -- but please read the book, because they get a lot stranger and more interesting!
Cyberneticist Valentino Braitenberg argues that his extraordinarily simple mechanical vehicles manifest behaviors that appear identifiable as fear, aggression, love, foresight, and optimism. The vehicle idea was a thought experiment conceived to show that complex, apparently purposive behaviour did not need to depend on complex representations of the environment inside a creature or agents brain. In fact simply by reacting to the environment in a consistent manner was more than enough to explain the low level reactive behaviours exhibited by many animals.